 ForceBand
ForceBand
Learning Forceful Manipulation with sEMG
Bring force into human data, for forceful manipulation.
Overview
Human demonstrations are a scalable data source for learning robot manipulation policies. However, common human demonstrations — such as motion-capture trajectories and internet videos — do not capture the contact forces that are critical for forceful manipulation. In this paper, we introduce ForceBand, a low-cost wrist-worn sEMG (surface electromyography) system for turning human muscle activity into force-enriched demonstrations. We first collect a 10-hour multimodal dataset containing egocentric video, sEMG, IMU, and fingertip forces across diverse actions and objects. Using this dataset, we pre-train an EMG2Force model that predicts per-finger forces from sEMG and IMU signals. After a short calibration, users can collect target-task demonstrations using only ForceBand and video; EMG2Force then labels these demonstrations with per-finger force traces, producing force-augmented demonstrations for robot policy learning. Experiments show that ForceBand recovers fine-grained fingertip interactions with over 50% lower force prediction error than vision-based baselines, and achieves an 87% success rate on pick, squeeze, and place tasks that require object-specific force control across objects with diverse shapes, sizes, and weights.
Robot-Data-Free
No teleoperation, no robot in the data loop — just natural human demos.
Force Beyond Vision
Muscles reveal forces cameras can't see — even on occluded fingers.
Free-Hand Force Sensing
Nothing on the fingertips during demos — the hand stays natural and visible.
Low Cost & Reproducible
As low as $300 — commodity parts, 3D-printed shell, open BOM.
Video
90 seconds, end to end
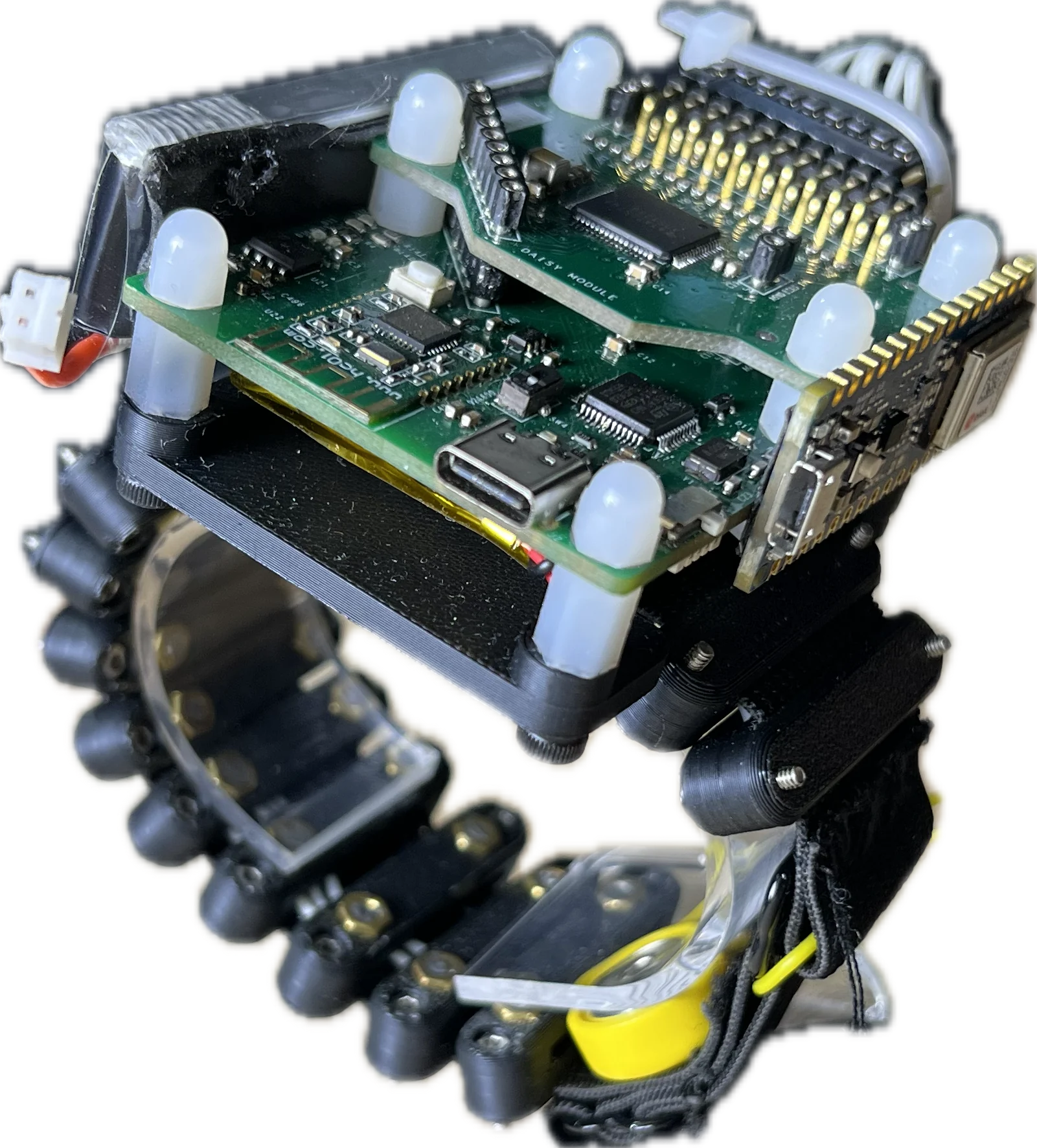
Hardware
Read finger forces at their source — the forearm muscles
Build our anatomically guided band for as low as $300, or use any 8-channel sEMG band with an IMU.
Muscle-aware by design
Low-noise
ADS-1299 front end — 0.14 µVrms, SNR 119.5.
Bipolar pairs
Suppress common-mode noise and motion artifacts.
Anatomically guided
8 channels: 7 finger muscles + 1 wrist flexion.
Reproducible
3D-printed, off-the-shelf parts, open BOM.
Open by design — built to extend
Off-the-shelf bands are locked: fixed channels, sealed, closed firmware.
Ours scales. The ADS1299 daisy-chains over one SPI bus — we added a second chip for a 16-channel band, same open BOM.
Dataset & Model
EMG2Force: muscles in, fingertip forces out
sEMG is noisy and personal. EMG2Force is pretrained once on 10 hours of paired data, then calibrated to each user in minutes.
A spectrogram-augmented transformer
5-second windows of 8-channel sEMG + a 10-D IMU stream at 250 Hz.
- Two views — STFT spectrogram (frequency) + raw streams (time).
- Transformer fusion — outputs one force trace per finger.
EMG2Force in the wild
The model, running live across everyday scenes — every clip pairs egocentric video with synchronized sEMG, IMU, and per-finger force.
10 hours, paired and diverse
Synchronized video + sEMG + IMU + fingertip force.
- Actions — pinch/grasp, pick&place, open/close, pour.
- Gestures — 2-, 3-, 5-finger, and in-the-wild.
- Objects — diverse shapes, sizes, weights. Public release planned.
Policy Learning
Three steps to a force-aware robot policy
Calibrate
~15 minutes of random play over varied objects, fingertip sensors on — adapts EMG2Force to your muscles.
Collect
Sensors off. Demonstrate with just ForceBand and video; EMG2Force labels per-finger forces.
Learn & deploy
Retarget to a parallel-jaw gripper and train a flow matching policy that predicts motion and force — zero-shot from human data.
Results
sEMG sees forces that vision cannot
ForceBand halves hand-level force error vs vision baselines (VISOR-HOS, FEEL) — and the gap widens on fingers vision can't read: ring PR AUC 0.763 vs 0.398, pinky 0.590 vs 0.314.
Why muscles beat pixels
- Occlusion-proof — hidden fingers still load their forearm muscles.
- Honest at the tail — vision collapses where contact is rare (prevalence 45% → 7%).
- Complementary — vision gives contact cues; muscles give magnitude.
Anatomy beats symmetry
Where you listen matters
More channels help (1.89 → 0.85 N MAE from 1 → 8) — and the anatomically guided layout beats an evenly spaced ring by a further 18% (0.77 vs 0.94 N).
Object-specific force, no force sensors at deployment
Pick–squeeze–place on a UR-5: nine objects, 43–650 g, grasp widths 1–72 mm, 15 demos each. ForceBand: 87%. Gripper-only baselines never produce the squeeze — the binary gripper scores zero on it.
Generalization Test
Citation